
{kind=link}

Onderzoekers van Carnegie Mellon University laten hun slangachtige, modulaire robots beter kruipen aan de hand van onderzoek naar hoe echte hoornratelslangen zich voortbewegen. Nu kunnen de robotslangen snellere en scherpere bochten maken.
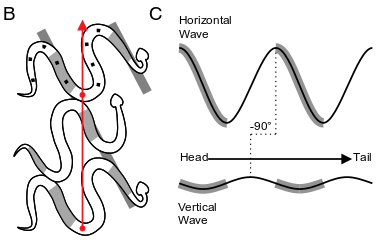
Het vervolgonderzoek waarin de wetenschappers dieper op de precieze beweging van de slang ingaan, staat dinsdag in de online-editie van het tijdschrift Pnas. Wat bleek: de hoornratelslang wijzigt stapsgewijs veranderingen in richting, door de horizontale golf, de golf evenwijdig aan de grond, aan te passen terwijl de verticale golf constant blijft. Een grote faseverandering in de verticale golf gaf de slang de mogelijkheid een scherpe draai te maken in de tegenovergestelde richting. Door deze manier van bewegen ook bij de robot in te voeren, kon de robotslang op eenzelfde manier draaien als de echte slang en tegelijkertijd was de robot makkelijker te controleren.
De modulaire slangenrobot uit de studie was speciaal ontworpen om horizontale en verticale golven door zijn lichaam te laten gaan in alle asrichtingen. De robotslang waarmee de tests werden uitgevoerd had 16 gewrichten en kon daarbij 27 verschillende poses aannemen. Het mechanische dier was 94cm lang en woog 3,15kg. Filmpjes met bewegende echte hoornratelslangen en de mechanische verre neef zijn te zien bij Pnas zelf.
Het onderstaande filmpje is geen illustratie van wat de onderzoekers de robotslang nu hebben laten doen. Zie voor filmpjes deze link. Dit zijn filmpjes behorende bij het artikel uit Pnas die we niet zomaar hier kunnen kopiëren.